Seita Kayukawa, Tatsuya Ishihara, Hironobu Takagi, Shigeo Morishima, and Chieko Asakawa
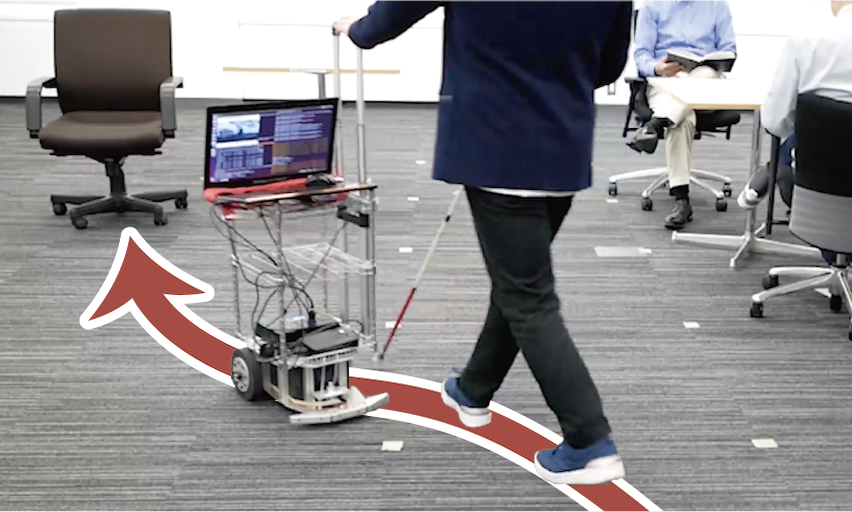
BlindPilot: A Robotic Local Navigation System that Leads Blind People to a Landmark Object
ACM CHI Conference on Human Factors in Computing Systems (CHI'20)
https://chi2020.acm.org/, https://doi.org/10.1145/3334480.3382954
Blind people face various local navigation challenges in their daily lives such as identifying empty seats in crowded stations, navigating toward a seat, and stopping and sitting at the correct spot 막돼먹은 영애씨 시즌1 다운로드. Although voice navigation is a commonly used solution, it requires users to carefully follow frequent navigational sounds over short distances. Therefore, we presented an assistive robot, BlindPilot, which guides blind users to landmark objects using an intuitive handle Download kms_dashboard. BlindPilot employs an RGB-D camera to detect the positions of target objects and uses LiDAR to build a 2D map of the surrounding area. On the basis of the sensing results, BlindPilot then generates a path to the object and guides the user safely Download Windows PhotoViewer. To evaluate our system, we also implemented a sound-based navigation system as a baseline system, and asked six blind participants to approach an empty chair using the two systems 인비저블 보이. We observed that BlindPilot enabled users to approach a chair faster with a greater feeling of security and less effort compared to the baseline system os x 매버릭스 다운로드.